

ისრების და სიგნალების მიკროპროცესორული ცენტრალიზაცია
არსებული ეც-ს სისტემების ანალიზი და მათი ექსპლუატაციის გამოცდილება მიუთითებს, რომ სარელეო სისტემა გამოყენებულია და მოქმედებს უკვე 60 წელზე მეტი წლის განმავლობაში, რის შედეგადაც აღინიშნება მტყუნებების რაოდენობის მნიშვნელოვანი ზრდა დღეისათვის ბევრ სამრეწველო საწარმოსა და მაგისტრალურ სარკინიგზო ტრანსპორტში ელექტრო ცენტრალიზაციის სისტემები მიკროპროცესორულ ცენტრალიზაციაზე (მ.პ.ც.) იცვლება.
ისრებისა და სიგნალების მიკროპროცესორული სისტემა დამატებით ინფორმაციას მიაწოდებს სადგურის მორიგეს და სარკინიგზო ტრანსპორტის სხვა მომხმარებელსაც სამატარებლო მდგომარეობის და სისტემის ელემენტების უწესივრობების გამოვლინებების შესახებ. მიკრო პროცესორული სისტემა აადვილებს ინფორმაციის გაცვლას სხვა საიფორმაციო -გამოთვლით და მმართველ სისტემებს შორის.
ისრებისადასიგნალების მიკრო პროცესორული ცენტრალიზაციის სტრუქტურული სქემა იძლევა საშუალებას გაზარდოსტექნიკურიმომსახურების ხარისხის დონე და სისტემის ექსპლუატაცია შემდეგნაირი მონაცემების ხარჯზე:
- სისტემის მოდულურობა;
- ინფორმაციის შეგროვების პროცესის ავტომატიზაცია;
- ინფორმაციის ლოგიკური დამუშავების ავტომატიზაცია;
- ავტომატიკისა და ტელემექანიკის ობიექტების მდგომარეობის შეცვლის დრო;
- ინფორმაციის გადაცემის ავტომატიზაცია;
- სხვადასხვა სარკინიგზო სამსახურების პერსონალისთვის ინფორმაციის ხელმისაწვდომობა;
- მოძრავი შემადგენლობების სადგურის ტერიტორიაზე მსვლელობის შესახებ ინფორმაციების შეგროვება, დამუშავება, ჩაწერა და შენახვა. სცბ-ს მოწყობილობების მდგომარეობის შეცვლისას, რომელიც კონტროლდება და ამის შესახებ ინფორმაცია გადაეცემა ზედა დონეზე მართვის ავტომატიზირებულ სისტემას (მ.ა.ს.);
- სისტემის მოქნილობა, რომელიც ითვალისწინებს მპც-მ სისტემის სხვა სისტემებთან ადვილ კოორდინაციას, რისთვისაც შეიქმნა კომუნიკაციის სტანდარტული პროტოკოლები.
 ნახ. 1. ელექტრული ცენტრალიზაციის სტრუქტურული სქემა
ნახ. 1. ელექტრული ცენტრალიზაციის სტრუქტურული სქემა
მ.პ.ც.-მ სისტემები ასრულებს შემდეგ ფუნქციებს:
- დადგენილი და საპასუხისმგებლო მართვის ფუნქციები;
- საკონტროლო და ჩვენებითი ფუნქციები;
- დამატებითი ფუნქციები;
- დიაგნოსტიკური ფუნქციები.
მ.პ.ც.-მ სისტემა შედგება რამდენიმე ქვესისტემისგან, რომელიც მოიცავს ტექნიკურ საშუალებების კომპლექსებს, რომლებიც წარმოქმნიან მართვისა და კონტროლის სამ დონეს (ნახ. 1) :
- ზედა დონე – სეგმ–ცპსმ და სეგმ – შმ თან დიალოგის ქვესისტემა;
- საშუალო დონე – ცენტრალიზაციის ლოგიკის ქვესისტემა;
- ქვედა დონე- შემსრულებელი მოწყობილობების მართვის და საველე მოწყობილობების კონტროლის ქვესისტემა.
დღეისათვის, ძირითადი ტექნოლოგიების მიერ განხორციელებული პროექტები ეფუძნება პროგრამირებად ლოგიკურ კონტროლერებს.
მიკროპროცესორული ცენტრალიზაციის აგებულება
ახალი ეც-ს პროექტირებისათვის უნდა შესრულდეს შემდეგი დავალებები :
- შემუშავებულ მიკროპროცესორულ სისტემებში (მპც-მ) ეც-ს ყველა ლოგიკური ფუნქციები, რომლებიც ზეგავლენას ახდენენ ან არ ახდენენ სისტემის უსაფრთხოებაზე, უნდა განხორციელდეს აპარატურული და პროგრამული უზრუნველყოფის სამრეწველო კომპიუტერებით დაპროგრამირებადი ლოგიკური კონტროლერებით (პლკ), ხოლო პირდაპირი კავშირი საველე მოწყობილობებთან სრულდება სარელეოში არსებული მართვისა და კონტროლის სქემებით.
- განვითარებად მპც-მ-ს უნდა ჰქონდეს მაღალი უსაფრთხოებისა და ასევე მტყუნებაგამძლე მონაცემები, რადგან სისტემაში დარღვევებმა არ გამოიწვიოს მატარებლების ინტენსიური მოძრაობის გრაფიკის დარღვევა.
- მოდერნიზებული მიკროპროცესული ცენტრალიზაცია უნდა იყოს სერიულად გამოშვებული ტექნიკური საშუალებები, რომელთაც აქვთ მონაცემების გადაცემის ღია პროტოკოლები.
- საცდელი პერიოდის დროს მოდერნიზებული მიკროპროცესული ცენტრალიზაციის პარალელურად ცივი ლოდინის რეჟიმში ჩართული უნდა იყოს არსებული სარელეო ელექტრული ცენტრალიზაცია და მოდერნიზებული მიკროპროცესული ცენტრალიზაციის მწყობრიდან გამოსვლის შემთხვევაში ავტომატურად ჩაერთოს საველე მოწყობილობების მართვის და საკონტროლო ელ.სქემებში.
სისტემის აგების ძირითადი პრინციპები
მპც-მ არის აპარატურისა და პროგრამული უზრუნველყოფის ნაკრები, რომელიც უზრუნველყოფს მატარებლის მოძრაობის ტექნოლოგიურ პროცესს. პროგრამული ლოგიკით უზრუნველყოფილი ტექნიკური საშუალებები უზრუნველყოფენ ცენტრალიზაციის ლოგიკის განხორციელებას… უსაფრთხოების პირობების გადამოწმების გზით, როგორც საგზაო მოძრაობის მართვის სისტემების მოთხოვნების შესაბამისად, ასევე თვით-დიაგნოსტირება.
რელეური მმართველი სქემები საველე მოწყობილობებით და ცენტრალიზაციის მოწყობილობების მდგომარეობის გადამწოდები, ახორციელებენ ელექტრული წრედების გადართვას (კომუტაციას), მიკროპროცესორულ და შემსრულებელ მოწყობილობას შორის გალვანურ გადაკავშირებას. სარელეო სქემები მოიცავს შემდეგ ტიპურ სქემებს: სარელსო წრედები, ისრების მართვის სქემები, სიგნალების მართვის და სასიგნალო რელეების სქემები, მმართველი რელეების სქემები მატარებლების სიჩქარის ავტომატური რეგულირების სასიგნალო სიხშირის შერჩევის მიზნით (გამოიყენება სადაც არსებობს „ასს-სარ“-ის სისტემა).
პროექტირებად ეც-ს სისტემაში გამოყენებულია სტრუქტურული სქემა, რომელიც ნაჩვენებია ნახ. 1- ზე. ფიგურიდან ჩანს, რომ მპც-მ შედგება რამდენიმე ქვესისტემისგან, რომელშიც შედის სხვადასხვა ტექნიკური საშუალებების კომპლექსები, რომლებიც ქმნიან კონტროლისა და მართვის სამ დონეს:
- ზედა დონე – მპც-მ-ის დიალოგის ქვესისტემა, ცენტრალიზაციის სასადგურო პოსტის მორიგის (ცპსმ) და ელექტრომექანიკოსი (შმ);
- შუა დონე – ცენტრალიზაციის ლოგიკის ქვესისტემაა;
- ქვედა დონე – ქვესისტემა, რომელიც მართავს შემსრულებელ მოწყობილობებს და ახორციელებს ცენტრალიზაციის მოწყობილობების მდგომარეობის და სარ-ის (სიჩქარის ავტომატური რეგულირება) კონტროლს.
ცენტრალიზაციის ლოგიკური ქვესისტემა ასრულებს ისრების და სიგნალების მართვას და ამოწმებს მათ ლოგიკურ ურთიერთ დამოკიდებულებას. გადამწოდებიდან ქვესისტემაში შედის ინფორმაცია ცენტრალიზაციის მოწყობილობების მდგომარეობის შესახებ. გადამუშავების შემდეგ ეს ინფორმაცია ტექნიკური საშუალებების მუშაობის ინფორმაციასთან ერთად გადაეცემა მპც-მ სისტემის დიალოგურ ქვესისტემაში ცპსმ და შმ -თან ერთად. სისტემის მართვის, კონტროლის და უსაფრთხოების უზრუნველყოფის ყველა ფუნქცია ცენტრალიზაციის ლოგიკის ქვესისტემის ტექნიკურ საშუალებებზეა დაფუძნებული.
დამუშავებული ცენტრალიზაციის სისტემა ფუნქციონირებს ორ რეჟიმში:
ა) მპც-მ სისტემის მართვის რეჟიმი -ამ რეჟიმში არ აქვს მნიშვნელობა ანუ მართვის რეჟიმის მიუხედავად (ადგილობრივი თუ დისპეტჩერული მართვის), რელეური ეც გამორთულია., ხოლო მპც-მ სისტემის ზედა და ქვედა დონის ტექნუკური საშუალებები უზრუნველყოფს მართვის ყველა ფუნქციის შესრულებას (მარშრუტების შედგენა და შეხსნა, მოწყობილობების დამოკიდებულებების ჩართვა / გამორთვა) და მათი შესრულების აუცილებელი შემოწმებით, ასევე აკონტროლებენ: საექსპლუატაციო მომსახურე – პერსონალის მოქმედებას, ცენტრალიზაციის მოწყობილობების მდგომარეობას (ისრები, ისრების ერთი მდგომარეობიდან მეორეში გადასვლისას დენის ძალის სიდიდის გაზომვა და ისრის გადასვლის დროს დაფიქსირება, სიგნალები, სარელსო წრედები, მცველები, დამიწების სიგნალიზატორები, ელექტროენერგიის კვების წყაროს განზომილებები და ა.შ.);
ბ) ეც-ს მართვის რეჟიმი – -ამ რეჟიმში არ აქვს მნიშვნელობა ანუ მართვის რეჟიმის მიუხედავად (ადგილობრივი თუ დისპეტჩერული მართვის) , ეც-ს ტექნიკური საშუალებები უზრუნველყოფენ მართვის და კონტროლის ფუნქციების შესრულებას. ამ რეჟიმში მპც-მ სისტემა აკონტროლებს მხოლოდ საველე მოწყობილობების მდგომარეობასა და სისტემისელემენტებს.
ერთი რეჟიმიდან მეორეზე გადართვას ახორციელებს სადგურის მორიგე მართვის პულტიდან, კერძოდ ხდება კვერთხ-გასაღების საშუალებით.
სისტემის შექმნისას მხედველობაში მიიღება, რომ მპც-მ სისტემას შეუძლია ურთიერთქმედება სხვა სისტემებთან, რომლებიც იყენებენ ციფრული მონაცემების ინტერფეისების მონიტორინგსა და კონტროლს, რომლებიც ხელს უწყობენ სხვადასხვა სტანდარტის საკომუნიკაციო პროტოკოლების მხარდაჭერას. გარდა ამისა, მპც-მ სისტემა შეიძლება ინტეგრირებული იყოს ზედა დონის ავტომატიზირებულ და ინფორმაციულ სისტემებში, ხოლო სისტემაში მონაცემთა გაცვლის პროტოკოლის მხარდაჭერა. როგორც სატრანსპორტო პროტოკოლი, მპც-მ სისტემაშიგამოყენება TCP / IP -ის და RS485 საფუძველზე აგებული “Modbus” -ის ტიპის პროტოკოლი.ამ ფიზიკური დონის პროტოკოლს აქვს სტანდარტიზირებული ტექნიკურ საშუალებები, რომლებიც მხარს უჭერენ, მპც-მ სისტემის პროგრამული ლოგიკის ზედა დონის სამუშაო ადგილების ტექნიკის საოპერაციო სისტემებს.
მპც-მ სისტემის ზედა და საშუალო დონის სტრუქტურა
როდესაც პროექტირდება მპც-მ სისტემის სტრუქტურულისქემა, რათა უზრუნველყოს მაღალი მდგრადობა, გამოიყენება შემდეგი ტექნიკური გადაწყვეტილებები:
- ტექნიკური საშუალებების რეზერვირება პროგრამული ლოგიკით, რომელიც უზრუნველყოფს: ეც-ს ფუნქციონერებას, მიკროპროცესორული მოწყობილობებისა და ელექტროენერგიის კვებას შორის მონაცემების მიწოდებას;
- სარეზერვო ტექნიკური საშუალებები, რომლებიც ფუნქციონირებენ მუშა არაგადატვირთულ რეჟიმში და ავტომატურად ჩაირთვებიან ძირითადი ტექნიკური საშუალებების მტყუნებისას;
- სარეზერვო ტექნიკური საშუალებების მუშაობისას უნდა შეკეთდეს ძირითადი მოწყობილობები და ავტომატურად უნდა ჩაირთოს სისტემაში ტექნიკური პერსონალის მიერ;
- მაღალ საიმედო აღჭურვილობის გამოყენება, რომელიც შეიძლება დამონტაჟდეს ელ.ენერგიის მოხსნის გარეშე;
- მონაცემთა გადაცემისას სტანდარტული პროტოკოლების გამოყენება;
- ყველა მიკროპროცესორულ მოწყობილობებს შორის ინფორმაციის გაცვლა ხდება მონაცემთა მაღალი სიჩქარეების გადაცემის არხით;
სისტემის უსაფრთხოების უზრუნველყოფა:
- მპც-მ სისტემა საშუალო დონის პროგრამული ლოგიკით ტექნიკური საშუალებებისთვის ორ არხიანი სქემის გამოიყენებით;
- პირველი კლასის საიმედოობის მქონე რელეების გამოყენება სარელეოში შემსრულებელი მოწყობილობების კომუტაციისათვის;
- გამოიყენება ორპოლუსიანი კომუტაციის მქონე პირველი კლასის საიმედოობის რელე მიკროპროცესორული მოწყობილობებით წარმოებული დამოუკიდებელი აპარატურის არხებით (რელე ამ შემთხვევაში, არის გადამწყვეტი მოწყობილობა, რომელიც ადარებს ორი არხის მუშაობის შედეგებს და მოქმედებს “და” ლოგიკის ჩართვის სქემით);
- ინფორმაციის შეყვანის / გამოყვანის მოდულების შესვლისა და გამოსვლის წესივრულობის უწყვეტი ჯვარედინი კონტროლი;
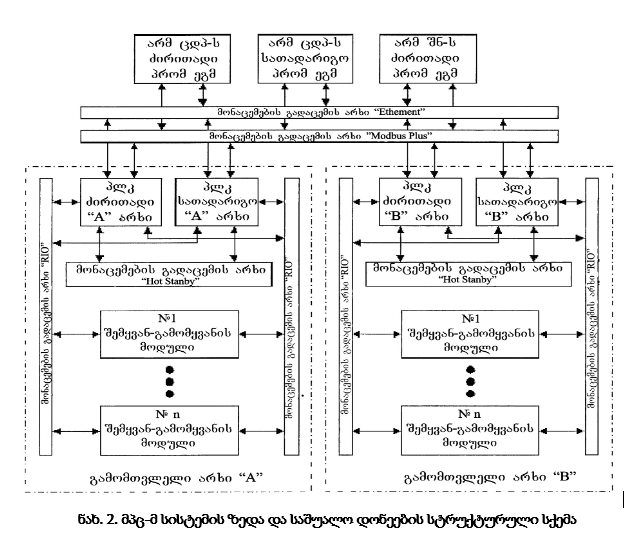
ნახ. 2. მპც-მ სისტემის ზედა და საშუალო დონეების სტრუქტურული სქემა
- პროგრამულ დონეზე უსაფრთხოების პირობების მუდმივი გადამოწმება, რომელიც შეესაბამება არსებულ ტიპიურ ალბომებს და მოძრაობის მართვის სისტემების მოთხოვნილებებს ;
- მპც-მ სისტემაში ბრძანებების შეყვანისას პროგრამულ დონეზე სადგურის მორიგის შეცდომითი ქმედებების გამორიცხვისათვის;
- უსაფრთხო ინტერფეისის ორგანიზების გზით მპც-მ-სისტემის და ოპერატორის ურთიერთქმედება სისტემაში საპასუხისმგებლო ბრძანებების შეყვანის დროს.
ნახ.2- ზე ნაჩვენებია სტრუქტურული სქემა, რომელიც შედგება საწარმოო ტიპის ორი კომპიუტერისგან (ძირითადი და სათადარიგო) ორი გამომთვლელი „A“ და „B“ არხისგან, რომელშიც შედის ორ-ორი ლოგიკურად პროგრამირებადი კონტროლლერები (ძირითადი და სათადაროგო – პლკ), n-რაოდენობის შემყვან/გამომყვანი მოდულებისგან, ლოგიკურად პროგრამირებად კონტროლლერებსა და შემყვან/გამომყვანი მოდულებს შორის მონაცემთა გაცვლის ორი არხისგან (ძირითადი და სათადარიგო ), მონაცემთა გადაცემის არხები ძირითად და სათადარიგო კონტროლლერებს შორის.
ინფორმაციის გაცვლა მპც-მ სისტემაში
ინფორმაცია მართვის ბრძანებაზე წინასწარი დამუშავების შემდეგ გადაეცემა ერთდროულად ძირითადი და სარეზერვო კონტროლლერზე დამოუკიდებელი «Ethernet» და «ModbusPlus» ჯგუფის გამომთვლელი არხების საშუალებით. მართვის ბრძანებების გაცემის პრიორიტეტი აქვს ძირითად კომპიუტერს. მისი მტყუნების შემთხვევაში ბრძანება გადაიცემა სარეზერვო კომპიუტერით. კონტროლლერები აეწყობიან ინფორმაციის Ethernet ქსელით მიღებისათვის. თუ ამ ქსელში ინფორმაცია საერთოდ არ არის ან მოდის შეცდომებით, კონტროლლერები მიღებული ინფორმაციის საფუძველზე მუშაობენ ModbusPlus ქსელის საშუალებით.
«Ethernet» და «ModbusPlus» – კონტროლლერების ბრძანებების ინფორმაცია ასევე მიეწოდება შნ-ს, რომ მოხდეს თანამშრომლების მოქმედების პროტოკოლირება და შემოწმდეს «Ethernet» და «ModbusPlus» -ს ქსელების მუშაობა.
მართვის ბრძანებების დამუშავების შემდეგ თითოეული კომპიუტერის ძირითადი და სარეზერვო კონტროლლერების საშუალებითშემსრულებელი მოწყობილობების მართვა ხდება დისტანციური I / O მოდულებით. ინფორმაცია ამ მოდულების შესახებ მოდის ძირითადი კონტროლერისგან, იმ პირობით, რომ ეს ფუნქციონალურია. წინააღმდეგ შემთხვევაში, დისტანციური I / O მოდულები მუშაობენ სარეზერვო კონტროლლერიდან. ინფორმაცია თითოეული კომპიუტერული სისტემისთვის დისტანციური I / O მოდულის შესახებ ერთდროულად ვრცელდება RIO ქსელის ორი ცალკეული დამოუკიდებელი ჯგუფის მონაცემთა მეშვეობით. პრიორიტეტული არხიაძირითადი. როდესაც ეს ვერ მოხერხდება ან დისტანციური I / O მოდული იღებს არასწორ ინფორმაციას, მაშინ გამოყენდება სარეზერვო არხი.
ინდივიდუალური საკომუნიკაციო არხების დისტანციური I / O მოდულები ახდენს ზემოქმედებას საველე მოწყობილობებზე სარელეო ელ.სქემების მართვით. ელ.წრედების და კვების წრედების კომუტაციით ხდება კონტროლლერის მართვის სქემების ჩართვა ან გამორთვა.
ინფორმაცია ცენტრალიზაციის მოწყობილობების მდგომარეობის შესახებგადაიცემა ინდივიდუალური მონაცემების არხების მეშვეობით, დისტანციური I / O მოდულების საშუალებით. უფრო მეტიც, ეს ინფორმაცია გადაიცემა ერთდროულად ძირითადი და სარეზერვო არხების მეშვეობით. ორივე “A” და “B” გამომთვლელი არხების ძირითად და სარეზერვო კონტროლლერების «RIO»-ს არხის მონაცემთა ქსელში.მონაცემთა გადამუშავების შემდეგ ( სხვადასხვა არხების მონაცემების შედარება) ინფორმაცია თავსდება ძირითადი ჯგუფის კონტროლლერებში ქსელში მონაცემთა გადაცემის არხები: «Ethernet» და «ModbusPlus» – მოხვდებიან ძირითადი და სარეზერვო PromEVM AWP DSTSP და PromEVM AWP SHN. იმ შემთხვევებში, როდესაც გამომთვლელი არხების ძირითადი კონტროლლერი არის გაუმართავი, მაშინ ინფორმაცია გადაიცემა სარეზერვო კონტროლლერის საშუალებით. ARMS DSNP- ისა და შ.ნ.-სთვის ინფორმაციის შეგროვება და გადაცემა ხდება მპც-მ სისტემის ტექნიკური საშუალებების საშუალო დონის საშუალებით.
გარდა ამისა, განხილული ინფორმაციის გადაცემის მიმართულებისას გათვალისწინებულია ინფორმაციის გაცვლის შესაძლებლობა გამომთვლელი არხების კონტროლლერებზე «Ethernet» და «ModbusPlus» ქსელების საშუალებით. ასეთი მონაცემთა გაცვლის არსებობა ორ პრობლემას გადაჭრის:
- შემცირდება ცენტრალიზაციის მოწყობილობების სტატუსის გადამწოდებიდან ინფორმაციის შეტანის ინდივიდუალური არხები. ასე რომ ინფორმაცია ერთი გადამწოდის შესახებ შედის “A” არხში, ხოლო მეორე – “B” არხში . იმისათვის, რომ თითოეულკომპიუტერულ არხზე ინფორმაცია ჰქონდეს ყველა სენსორული მდგომარეობის შესახებ, მონაცემთა გაცვლა ხდება “A” და “B” კომპიუტერულ გამომთვლელარხების კონტროლლერებზე.
- კონტროლლერის “A” და “B” არხების ტესტირების შედეგების გაცვლის ორგანიზება, რათა უზრუნველყოფილი იყოს უწყვეტი ჯვარედინი შემოწმება და კონტროლიშესასვლელების და გამოსასვლელების წასივრულობაზე და დისტანციური საშუალებებით შემავალი / გამომავალი მოდულების ინფორმაციის შედეგების აღრიცხვა.
ყოველი გამომთვლელი არხის ძირითად და სარეზერვო კონტროლლერს შორის არსებობს “ცხელი” ბმული, რომელიც იყენებს “Hot Stanby” მონაცემთა არხს. ამ კავშირის დახმარებით, ხდება ინფორმაციის გაცვლა კონტროლლერების ტექნიკური საშუალებების შესახებ. ამ ინფორმაციის საფუძველზე, მიიღება გადაწყვეტილება:ძირითადი ან სარეზერვო კონტროლლერი მონაწილეობას მიიღებს მმართვის ბრძანებების გადაცემაში დისტანციურ I / O მოდულებისა და ცენტრალიზაციის მოწყობილობების მდგომარეობის შესახებ.
სისტემის ფუნქციონირების პრინციპები
მართვის რეჟიმში მპც-მ სისტემით მარშრუტის შედგენა და გაუქმება, მარშრუტების ხელოვნური შეხსნა, დამხმარე და ინდივიდუალური ღილაკებით ისრების გადაყვანა სრულდება ცენტრალური პოსტის მორიგის მიერ, ხოლო სიგნალების გადაკეტვა, დაშლა სრულდება ავტომატიკის გამომთვლელი არხების კონტროლლერების მეშვეობით (მორიგის გარეშე).
მპც-მ სისტემაში საველე მოწყობილობების სამართავი ბრძანებების შეყვანა ხორციელდება“მაუსის“ ტიპის მანიპულატორების საშუალებით და მოწმდება მორიგის მოქმედებების სისწორე. თუ ბრძანების შესრულება რეალიზებადია მაშინ ეს ბრძანება გადაეცემა გამომთვლელი არხების კონტროლლერებს და „შ“-ს ინჟინერის ელექტრო გამომთვლელ მანქანას, სადაც ფიქსირდება ბრძანების მიღების დრო და მისი ტიპი. წინააღმდეგ შემთხვევაში მიწოდებული ბრძანება გადაეცემა მხოლოდ „შ“- ს ინჟინერს, სადაც ფიქსირდება ბრძანების მიღების დრო, მისი ტიპი და მიზეზი თუ რატომ არ სესრულდა ეს ბრძანება.
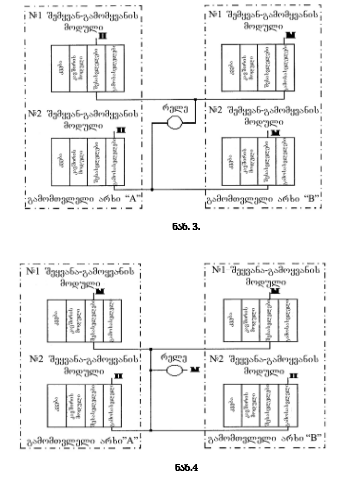
გამომთვლელი არხების კონტროლლერები გადაამუშავებს ცენტრალური პოსტის მორიგის მიერ გადაცემულ ბრძანებას და თუ შესრულდება აუცილებელი ლოგიკური პირობები, მაშინ იწყებს ფორმირებას სარელეო მოწყობილობების მართვის სიგნალები. წინააღმდეგ შემთხვევაში ცენტრალური პოსტის მორიგეს და „შ“-ს მექანიკოსს (ინჟინერს) გადაეცემა ინფორმაცია, თუ რა მიზეზით არ შესრულდა ეს ბრძანება. კონტროლლერის გამოსასვლელები მიერთებულია უშუალოდ რელესთან ყოველგვარი დამატებითი მოწყობილობების გარეშე (ნახ. 3). სარელეო მოწყობილობების მართვა ხდება რელეს კოჭის გრაგნილებზე ძაბვის მიწოდებით ან მოხსნით. ამ რელეების საკონტაქტო ჯგუფები ქმნიან ელ.წრედებს, რომლითაც ხდება ისრების და შუქნიშნების მართვა.
მიკროპროცესორული ცენტრალიზაცია, როგორც მპც-მ ასევე ეც-ს რეჟიმში აკონტროლებენ ცენტრალიზაციის მოწყობილობების მდგომარეობას. მათ შორის ელექტრო მოწყობილობებს და მონაცემთა გადაცემას. ცენტრალიზაციის მოწყობილობების მდგომარეობის შესახებ ინფორმაციის მოპოვება ხდება დისკრეტული სენსორების (რელეს კონტაქტები) ან ანალოგური ინფორმაციის (საზომი მოწყობილობა) მეშვეობით, რომლებიც გადამოწმდება მუდმივად გარკვეული ინტერვალის პერიოდულობით. ცენტრალიზაციის მოწყობილობების მდგომარეობის შესახებ ინფორმაციის ფორმირება ხორციელდება ორი გამომთვლელი არხის კონტროლლერის საშუალებით. ტექნიკური საშუალებების მუშა მდგომარეობაში ყოფნის შესახებ ინფორმაციის მისაღებად სრულდება შემდეგი
- გამოთვლითი არხების აპარატურის მდგომარეობების უწყვეტი შიდა თვითდიაგნოსტიკა;
- მონაცემთა გადაცემის არხებისგან მიღებული ყველა ინფორმაციის შედარება მპც-მ- ის ზედა და საშუალო დონეზე;
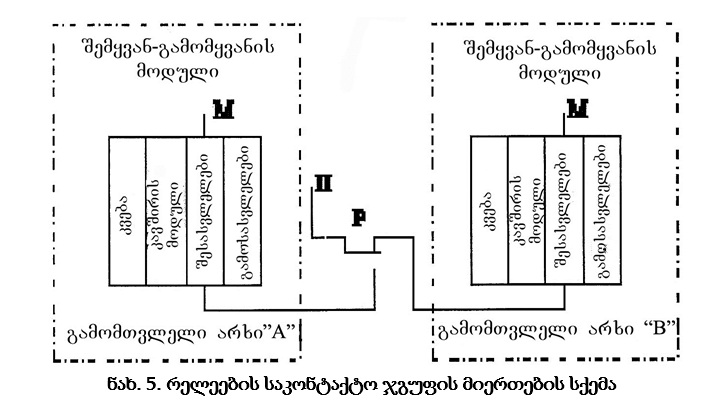
ნახ. 5. რელეების საკონტაქტო ჯგუფის მიერთების სქემა
- პროგრამული უზრუნველყოფის დონის შემოწმება კონტროლლერებისდისტანციური I / O მოდულების შესასვლელებზე და გამოსასვლელებზე, იმპულსური სიგნალების არსებობა, რომლებიც განსაზღვრულია დროითი პარამეტრებით.
სველე მოწყობილობებისმდგომარეობის და მპც-მ სისტემის ტექნიკური საშუალებებზე არსებული მტყუნებების ინფორმაცია, გადაეცემა ცენტრალური პოსტის მორიგეს და ყველა მღებული ინფორმაცია გამოჩნდება სადგურის სქემატურ გეგმაზე.
ინფორმაციის შეყვანის და გამოყვანის სქემების შექმნა
სქემატური გადაწყვეტილებები იყოფა ორ კატეგორიად: მართვის და კონტროლის კატეგორიებად.
მართვის სქემებიმოიცავს სარელეო მოწყობილობების მართვის და კონტროლლერების შესასვლელ -გამოსასვლელების სქემებს. მართვის სიგნალები დისტანციური I / O მოდულის ერთი გამომთვლელი არხის საშუალებით მიეწოდება უშუალოდ რელეს გრაგნილის ერთ გამომყვანზე, ხოლო მეორის საშუალებით კი მეორე გამომყვანზე. შემსრულებელი რელეების ფუნქციების მიხედვით, სქემები პროექტდება ლოგიკური სქემების ორი პრინციპის გამოყენებით: “და” და “ან”.
“და” პრინციპი – რელეს ჩასართველად მისი გრაგნილებზე,ელ.კვება მიეწოდება სხვადასხვა არხების კონტროლლერებიდან. დადებითი „პოლუსი“ “A” არხს უწევს კომუტაციას, ხოლო უარყოფითი – “B” არხს. ამდენად, ორპოლუსიანი კომუტაციის პირობებში შესაბამისი შემსრულებელი რელე, რომ დადგეს დენქვეშ აუცილებელია ორივე არხიდან ერთდროულად მიეწოდოს ბრძანება. ამასთანავე, კონტროლლერების გამომთვლელი არხების ტექნიკური საშუალებებით ხდება მართვის მოქმედების გადაცემის ჯვარედული კონტროლი. სიგნალის არსებობა “A” – არხის გამოსასვლელზე კონტროლდება “B” არხის შესასვლელით და პირიქით. შემსრულებელი ორპოლუსიანი რელეს მიერთება კონტროლლერების არხებთან ნაჩვენებია ნახ. 3 -ზე.
“ან” პრინციპი – რელეს ჩასართველად მისი გრაგნილებზე, ელ.კვების დადებითი „პოლუსი“ მიეწოდება “A” და “B” არხების კონტროლლერებიდან, ხოლო უარყოფითი „პოლუსი“ – რელეს გრაგნილებზე მიეწოდება მუდმივად. ამდენად, შემსრულებელი რელეს აღგზნება შესაძლებელია, როდესაც ბრძანება გაცემულია რომელიმე არხით.
გამომთვლელი არების კონტროლლერების დამატებითი ტექნიკური საშუალებებით კონტროლდება მართვის მოქმედება. შემსრულებელი რელეს ერთპოლუსიანი მიერთება კონტროლლერების არხებთან ნაჩვენებია ნახ. 4-ზე.
საკონტროლო სქემები საშუალებას გვაძლევს მივიღოთ ინფორმაცია გადამწოდებისაგან.ეს პროცესი ხდება აუცილებელი რელეების და კნოპების საკონტაქტო ჯგუფების მონაწილეობით იმისათვის, რომლებიც ამავე დროს ასრულებენ სენსორების მოვალეობას. კონტროლერების გამოსასვლელებზე მიერთებულია რელეების საკონტაქტო ჯგუფი, რომლებიც არ გამოიყენება ყველა სქემისთვის. რელეს საერთო კონტაქტზე მუდმივად მიეწოდება ელ.კვებისპლუსოვანი პოლუსი. რელეს ფრონტული კონტაქტის შეკვრა კონტროლდება “A” გამომთვლელი არხის საშუალებით,ხოლო ზურგული კონტქტის – “B” არხით. რელეს საკონტაქტო ჯგუფის კონტროლლერთან მიერთების სქემა ნაჩვენებია ნახაზ 5-ზე.
ნახ.3 – ნახ.5 -ზე მოცემული სქემები პროექტდება იმის გათვალისწინებით, რომ გამოყენებული იქნება პირველი კლასის საიმედოობის ნმშ -ტიპის და “Quinnum” სერიის და “Schneider Electric” ფირმის კონტროლერები. ამ სერიის კონტროლერების I / O მოდულებს შესასვლელებზე და გამოსასვლელებზე აქვთ გალვანური ცვლა.
ნახ. 5-ზე ნაჩვენებია რელესსაკონტაქტოჯგუფისმიერთების სქემა.
ავტომატიკის სისტემიდან მიღებული ინფორმაცია, რომელიც გამოიყენება მიკროპროცესორული ელემენტების ბაზის გამოყენებისას, უნდა განხორციელდეს ციფრულ მონაცემთა გადაცემის ინტერფეისების გამოყენებით, რომლებსაც გააჩნიათ სხვადასხვა სტანდარტის საკომუნიკაციო პროტოკოლები.
საველე მოწყობილობების მართვის და კომუტაციის სქემები
მოქმედი მართვის და საკონტროლო სქემების რეკონსტრუქციისას ან მათი მოდერნიზაციისას მპც-მ სისტემა ( საველე მოწყობილობებთან მიერთებისას) შეიძლება ადაპტირებული იქნეს ნებისმიერ სქემატურ გადაწყვეტილებებთან.
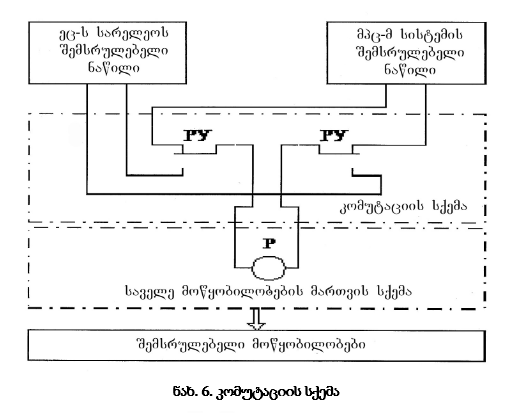
აპარატურის ექსპლუატაციის დროს მპც-მ და ეც-ს სისტემების საშუალებების ერთდროულად მართვის გამორიცხვისათვის მათი მართვის სქემები განცალკევებულია კომუტაციის სქემის РУ რელეს საშუალებით. მპც-მ-ის მართვის რეჟიმში საველე მოწყობილობების
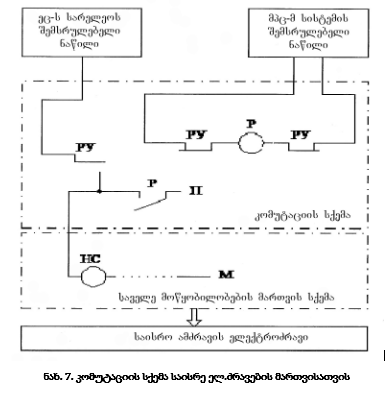
ნახ. 7. კომუტაციის სქემა საისრე ელ.ძრავების მართვისათვის
მართვის სქემები უერთდებადისტანციური I / O მოდულების გასასვლელებს РУ რელეს ფრონტული კონტაქტების საშუალებით. მართვის რეჟიმში, РУ რელეს ზურგული კონტაქტების საშუალებით საველე მოწყობილობების მართვის სქემები დაკავშირებულია ელექტრული ცენტრალიზაციის შემსრულებელ ელემენტებთან.
კომუტაციის და საისრო ამძრავების ჩართვის სქემა ნაჩვენენია ნახ.6-7-ზე.
რედაქტორი: მ. ჩალაძე

0 Comments